Science-Story ➜ Large Modifiable Underwater Mothership (MUM)

Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Privacy.
Eine neue modulare Unterwasserfahrzeug-Klasse
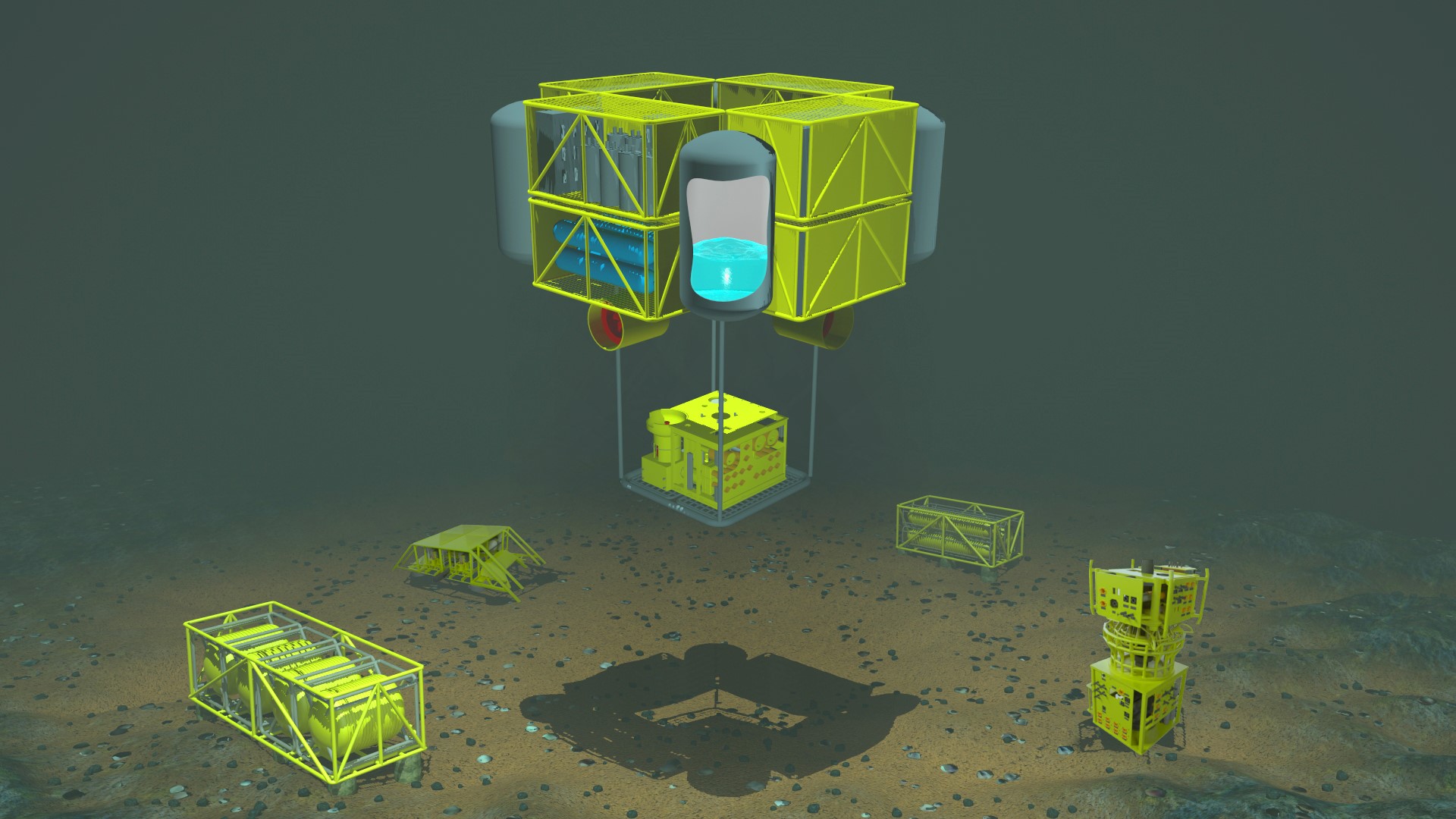
Ziel des Verbundvorhabens „Large Modifiable Underwater Mothership“ (MUM) ist die Entwicklung einer neuartigen Klasse modularer unbemannter Unterwasserfahrzeuge.
Mit unterschiedlich kombinierbaren Modulen wird das individualisierte Fahrzeug fähig sein, verschiedenste Aufgaben durchzuführen.
Dies wird durch ein konsequentes Aufbrechen klassischer Fahrzeugstrukturen erreicht. Der Aufbau im Baukastenprinzip erlaubt die missionsspezifische Zusammenstellung einzelner Basismodule mit speziellen Missionsmodulen zu großen Systemen. Das Aufgabenspektrum reicht von Nutzlasttransport und -operationen, über Explorationsmissionen bis hin zu stationären Aufgaben in der Tiefsee.
Die Entwicklung systemrelevanter Module führt aufgrund deren Wiederverwendbarkeit zu einer drastischen Kostenreduktion und deutlich schnelleren Entwicklungszyklen gegenüber konventionellen Fahrzeugkonzepten. Neu entwickelte Missionsmodule können mit geringem Aufwand integriert werden.
Der Projektverbund, koordiniert durch die thyssenkrupp Marine Systems GmbH, besteht aus dem Team am Lehrstuhl Regelungstechnik von Prof. Torsten Jeinsch an der Universität Rostick, der ATLAS Elektronik GmbH, der EvoLogics GmbH und der TU Berlin – Fachgebiet Entwurf und Betrieb Maritimer Systeme.
Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Privacy.
MUM auf der auf 12. Nationalen Maritimen Konferenz präsentiert
Das BMWi-Förderprojekt MUM (Large Modifiable Underwater Mothership) mit seinen Partnern thyssenkrupp Marine Systems GmbH, ATLAS Elektronik GmbH, EvoLogics GmbH, Technische Universität Berlin und Universität Rostock präsentierten sich am 10. Mai 2021, dem Eröffnungstag der 12. Nationalen Maritimen Konferenz Rostock.
Im Rahmen einer Live-Schaltung wurde das Forschungsprojekt MUM von Dr. Rolf Wirtz, CEO und Vorsitzender der Geschäftsführung der thyssenkrupp Marine Systems GmbH, und Professor Torsten Jeinsch vom Institut für Automatisierungstechnik der Fakultät für Informatik und Elektrotechnik der Universität Rostock im Beisein des Koordinators der Bundesregierung für die maritime Wirtschaft, Norbert Brackmann, vorgestellt.
Das Verbundvorhaben MUM aus Industrie und Wissenschaft entwickelte ein modulares Baukastensystem für eine neue, innovative Fahrzeugklasse zur Erkundung und ressourcenschonenden Nutzung der Weltmeere. Dabei bricht MUM mit konventionellen Strategien. In einer einzigartigen Modulbauweise können Basismodule zusammen mit speziellen Missionsmodulen zu großen Systemen zusammengestellt werden. Das angewendete Baukastenprinzip erlaubt so eine missionsspezifische Zusammenstellung.
Die Universität Rostock entwickelte dafür neue Methoden zur Modellgenerierung und zur Regelung flexibel strukturierbarer Unterwasserfahrzeuge. So wurde der Transformationsgedanke auch in die automatische Steuerung und Regelung des MUM implementiert. Außerdem wurden Herausforderungen zur Eigen- und Fremdsicherheit großer autonomer Fahrzeuge im Rahmen einer fehlertoleranten Missionsführung untersucht und erfolgreich validiert.
Entwicklung eines Steuerungssystems für MUM
Die Universität Rostock mit dem Team um Prof. Torsten Jeinsch bringt ihre Expertise im Bereich Regelungstechnik ein und entwicklet neue Methoden zur Modellgenerierung und zur Regelung modularer Unterwasserfahrzeuge.
MUM-Steuerungssystem – Tauchversuche im Tiefwasserbecken
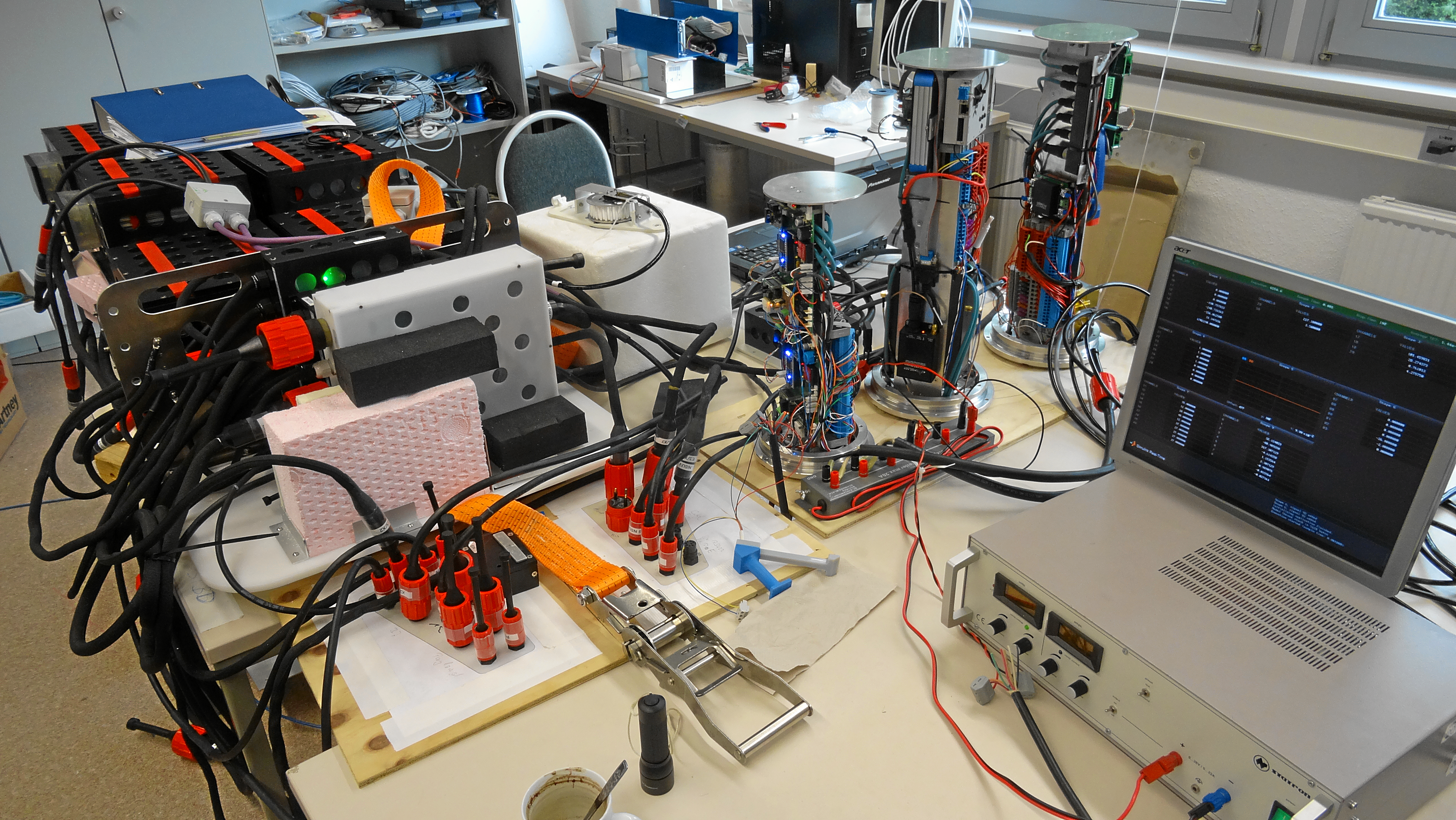
Im Rahmen des aktuell laufenden Projekts MUM und im Zusammenhang mit einer studentischen Arbeit wurden im Zeitraum vom 11. bis zum 13. Dezember 2017 Tauchversuche im Tiefwasserbecken der TU Berlin durchgeführt.
Ziel dieser Versuche war es, Messdaten für das Bewegungsverhalten eines Unterwasserfahrzeuges bei Tauchgängen zu sammeln. Mit diesen Messdaten sollen im Folgenden die Parameter eines Bewegungsmodells des verwendeten Fahrzeugs identifiziert und ein entsprechender Tiefenregler entwickelt werden.
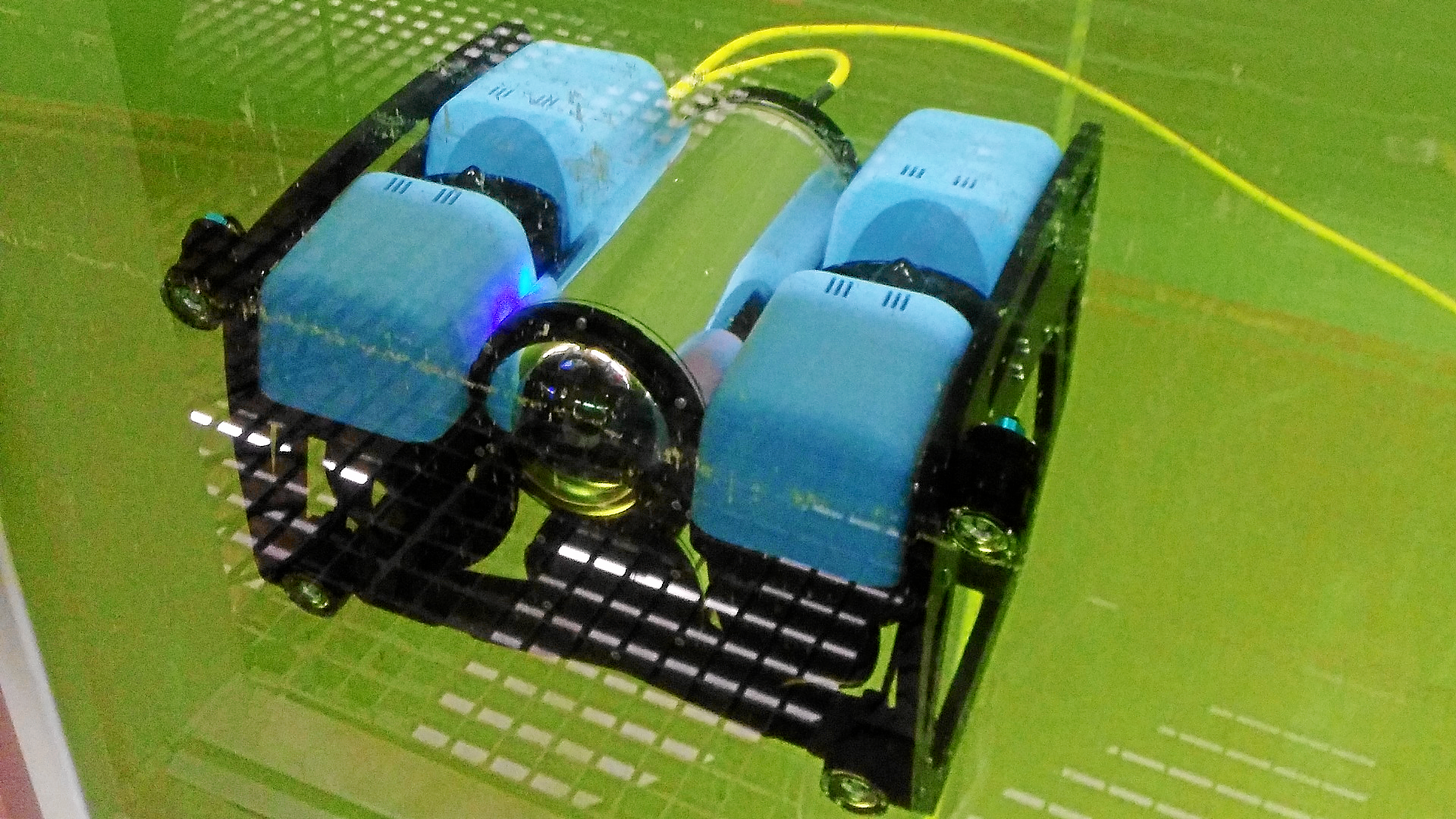
Als Versuchsfahrzeug wurde für diese Messungen ein BlueROV2, ein kabelgeführtes Unterwasserfahrzeug, eingesetzt. Wir danken der TU Berlin, insbesondere Dipl.-Ing. Sebastian Ritz und Dipl.-Ing. Matthias Golz, für die Möglichkeit die Messungen in den Räumlichkeiten der Universität durchzuführen und für die Unterstützung während der Versuche.
Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Privacy.
MUM – Studien zum Missionsleit- und Kontrollsystem
Das Projekt MUM bricht mit alten Konventionen fester Fahrzeugformen: Der einzigartige modulare Aufbau ermöglicht eine Änderung der Fahrzeugkonfiguration für jeden Einsatz und jede Anwendung. Dabei können sich je nach konkreter Missions-Ausstattung sowohl Fahrzeuggröße, als auch Fahrzeugform und Gewichtsvterteilung ändern.
Darüber hinaus kombinieren die MUM-Fahrzeuge die Funktionen von AUV (Automated Unmanned Vehicle) und ROV (Remote Operated Vehicle). Dies führt dazu, dass unterschiedliche Betriebsarten, wie Transit und Dynamic Positioning, erforderlich sind.
Das skalierte Funktionsmodell wurde hauptsächlich von der Technischen Universität Berlin und der Universität Rostock entwickelt, um die Modularitätskonzepte zu validieren, insbesondere in Bezug auf die Missionsführung (ATLAS ELEKTRONIK GmbH) und das Kontrollsystem (Universität Rostock), die die Flexibilität beim Wechsel der äußeren Fahrzeugform vor Beginn der Mission je nach Einsatzszenario bewältigen müssen.
Das Video vom Januar 2020 zeigt die Ausführung einer beispielhaften Mission, bei der ein Wandabschnitt in zwei Schichten durch Ändern der Tiefe und des Neigungswinkels (Nase hoch und Nase runter) während der Versuche im Schlepptank des ehemaligen Labors für Wassertechnik und Schiffbau (VWS) beim Projektpartner Technische Universität Berlin vom MUM gescannt wurde.

Prof. Dr.-Ing. Torsten Jeinsch
Lehrstuhl Regelungstechnik | Leiter Anwendungszentrum Regelungstechnik (AZR)
➜ Short Card | ➜ Science Stories | ➜ Homepage | ➜ AZR