Science-Story ➜ Versuche zu den Grundlagen der Regelungstechnik
Versuch zu den Grundlagen der Regelungstechnik → Ball on Wheel
Am Ball-auf-Rad-Versuchsstand arbeiten die Studierenden begleitend zur Regelungstechnik-Grundlagenvorlesung und wenden die Vorlesungsinhalte praktisch an.
Ein Pendel ist ein System, welches über zwei Ruhelagen verfügt. Hängt das Pendel senkrecht nach unten, so befindet es sich in seiner stabilen Ruhelage. Steht es dagegen aufrecht nach oben wird ebenfalls eine Ruhelage eingenommen, diese ist aber instabil und wird bei kleinsten Störungen bzw. Anregungen verlassen. Ist das Erreichen und Halten der instabilen Ruhelage das übergeordnete Ziel des Gesamtsystems aus Regelung und Pendel, so spricht man in diesem Zusammenhang von einem inversen Pendel.
Inverse Pendel begegnen uns im täglichen Leben in den unterschiedlichsten Ausprägungen. Zweirädrige Fortbewegungsmittel wie Fahr- oder Motorräder können beispielsweise als inverses Pendel aufgefasst werden. Die gezielte Fortbewegung und Stabilisierung im instabilen Arbeitspunkt werden dabei nur durch die geübten Eingriffe des Fahrers ermöglicht. Technische Systeme bei denen die Stabilisierung eines inversen Pendels durch eine Regelung erfolgt, sind beispielsweise moderne Fahrzeuge wie der Segway, Raketen (SpaceX) oder auch sehr agile Strahlflugzeuge.
Das System „Ball auf Rad“, bei dem versucht wird, einen Ball auf einem Rad durch die Drehung des selbigen zu balancieren, stellt ebenfalls ein inverses Pendel dar. Die am Motor anliegende Spannung stellt dabei die Eingangsgröße und die über einen Lasersensor gemessene Position die Ausgangsgröße des Systems dar. Aufgrund der geringen Komplexität in Kombination mit dem anspruchsvollen Systemverhalten wird dieser Versuch oft in der Lehre eingesetzt, um die Gruppe der stabilisierenden Regelungen an instabilen Prozessen zu repräsentieren.
Der Begriff der Stabilität als Eigenschaft eines Systems und die Problematik der stabilisierenden Regelungen sind Kernelemente der Vorlesung „Grundlagen der Regelungstechnik“, die im Bachelor-Studiengang Elektrotechnik angesiedelt ist. An dem Versuchsaufbau „Ball auf Rad“ können die Studierenden im Rahmen mehrerer Praktika die Modellierung (Abbildung physikalischer Zusammenhänge in einer Rechenvorschrift), Simulation und das systematische Einstellen von Reglern üben und die in der Vorlesung vermittelten theoretischen Inhalte praktisch vertiefen.
Versuch zu den Grundlagen der Regelungstechnik → E-Copter
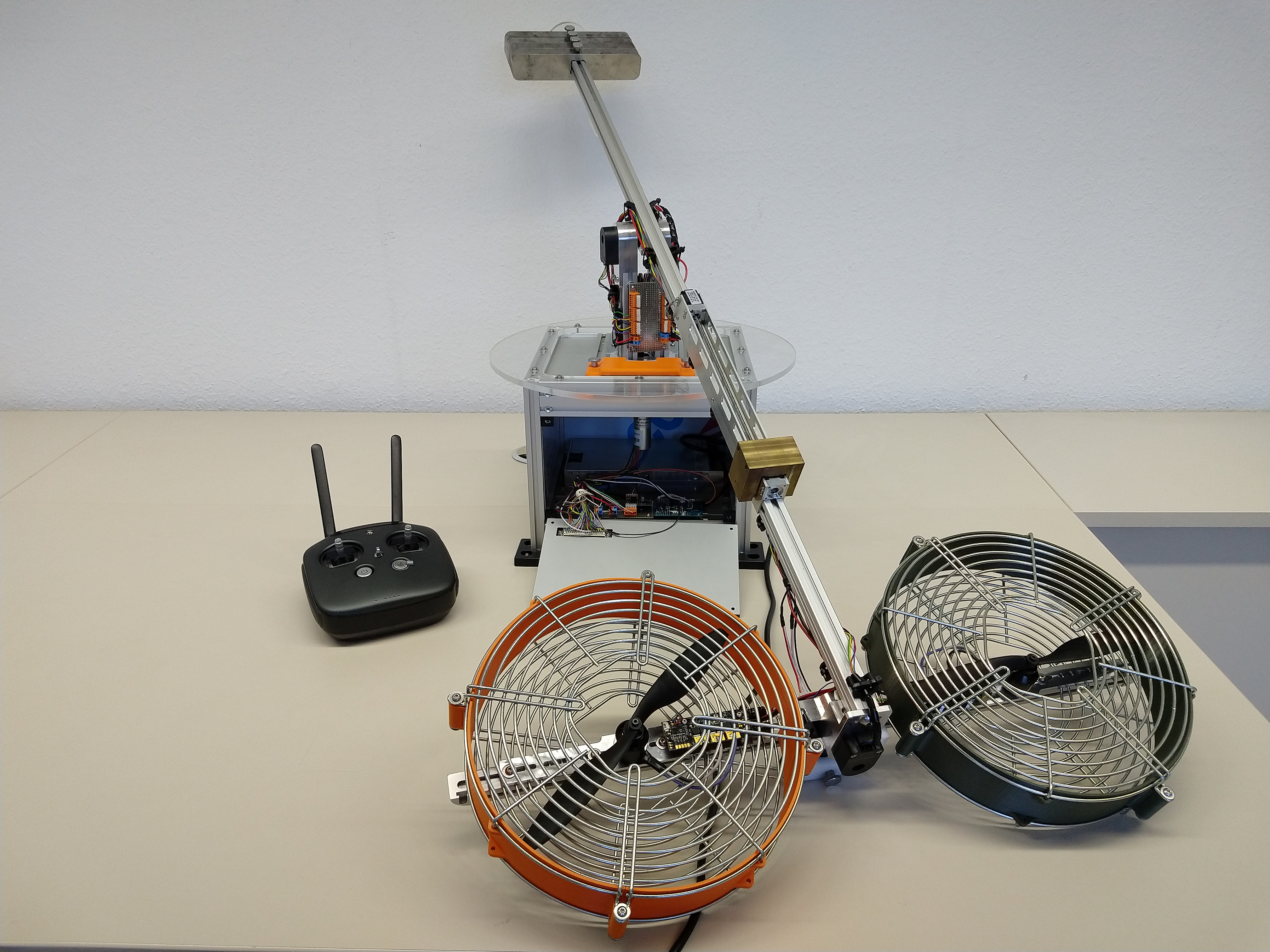
Am 3-DOF-Helikopter-Versuchsstand (Degrees of Freedom) arbeiten die Studierenden begleitend zur Regelungstechnik-Grundlagenvorlesung und wenden die Vorlesungsinhalte praktisch an.
Das Ziel in diesem anspruchsvollen Laborpraktikum ist es, Methoden zur Modellierung eines elektromechanischen Systems über die Simulation des Modells bis hin zum Steuerungs- und Regelungsentwurf mit einer anschließenden Implementierung am Versuchsstand vertiefend anzuwenden.
Der 3-DOF-Helikopter-Versuchsstand ist ein zweirotoriger Helikopter, der an einem Ausleger befestigt, rotatorische Bewegungen ausführen kann. Die beiden Propeller werden von Gleichstrommotoren angetrieben und sind an einem Gelenk aufgehängt, das am Ende eines langen Arms montiert ist. Das andere Ende des Arms wird mit einem Gelenk mit zwei Freiheitsgraden am Gestell befestigt. Hierdurch können Arm und Helikopter sowohl um die vertikale Achse als auch die Elevationsachse gedreht werden. Alle Achsenpositionen werden hochauflösend gemessen. An diesem elektromechanischen Modell werden die Herausforderungen, die bei einem realen Helikopter auftreten, in einem vereinfachten Maßstab erlebbar.
Die Studenten lernen und vertiefen ihre Kenntnisse zur Zustandsraumbeschreibung und Zustandsregelung von Mehrgrößensystemen an einem anspruchsvollen Versuchsaufbau.
Entstanden ist der Laborversuchsstand im Rahmen einer Dissertation zur Untersuchung von Stellbegrenzungen bei Adaptiven Regelungen. So kann dieser Laborversuchsstand mit einer verschiebbaren Masse am Hebelarm ausgerüstet werden. Die verschiebbare Masse verursacht eine erhebliche Veränderung des Flugverhaltens des Helikopters. Für solche Fälle sind die konventionellen Steuerungs- und Regelungssystemen entsprechend zu erweitern.
Versuch zu den Grundlagen der Regelungstechnik → E-Motor
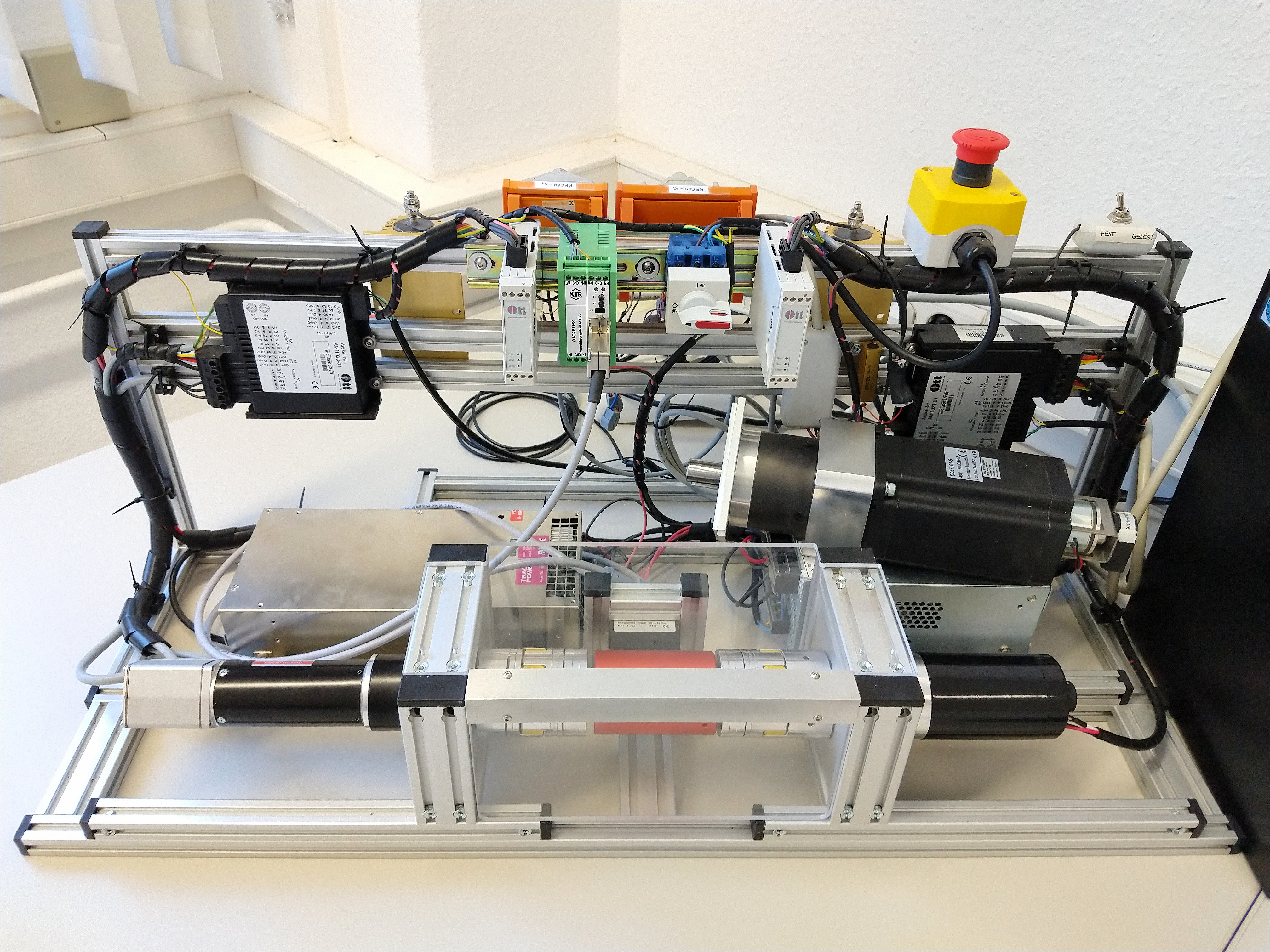
Am Elektromotor-Prüfstand arbeiten die Studierenden begleitend zur Regelungstechnik-Grundlagenvorlesung und wenden die Vorlesungsinhalte praktisch an.
Das Ziel in diesem Laborpraktikum ist es, eine Regelung für die Motordrehzahl zu entwerfen, d.h. auch unter dem Einfluss von Störungen soll die Drehzahl auf einem vorgegebenen Wert gehalten werden. Verschiedene Störungen können dabei mit einem zweiten „Gegenspielermotor“ aufgeprägt werden. Die Studierenden lernen die Auswirkungen von unterschiedlichen Einstellungen des Drehzahlreglers auf das Verhalten des Motors kennen und sehen (bzw. hören) die Effekte direkt am Laboraufbau.
Diese Drehzahlregelung ist vergleichbar mit einem Tempomaten im Auto: Die Fahrgeschwindigkeit hängt über die Raddrehzahl und das Getriebe letztendlich mit der Motordrehzahl zusammen. Verlangsamt sich das Auto, weil es z.B. einen Berg hinauffährt (Störung), muss der Tempomat das Auto beschleunigen, um die gewünschte Geschwindigkeit wieder zu erreichen.
Entstanden ist der Laborprüfstand im Rahmen einer studentischen Abschlussarbeit, in der auch weitere Aspekte am Prüfstand herausgearbeitet wurden. So sind verschiedene Drehzahlsensoren mit unterschiedlicher Genauigkeit verbaut, um das Verhalten der Regelung auch bei ungenauen Messwerten zu testen. Außerdem kann neben der Drehzahl auch das Drehmoment geregelt werden.

Prof. Dr.-Ing. Torsten Jeinsch
Lehrstuhl Regelungstechnik | Leiter Anwendungszentrum Regelungstechnik (AZR)
➜ Short Card | ➜ Science Stories | ➜ Homepage | ➜ AZR