Science-Story ➜ Remotely Operated Vehicle (ROV) beim Ostsee-Einsatz
Erforschung von Methoden für ein intelligentes Regelungssystem für modulare Unterwasserfahrzeuge
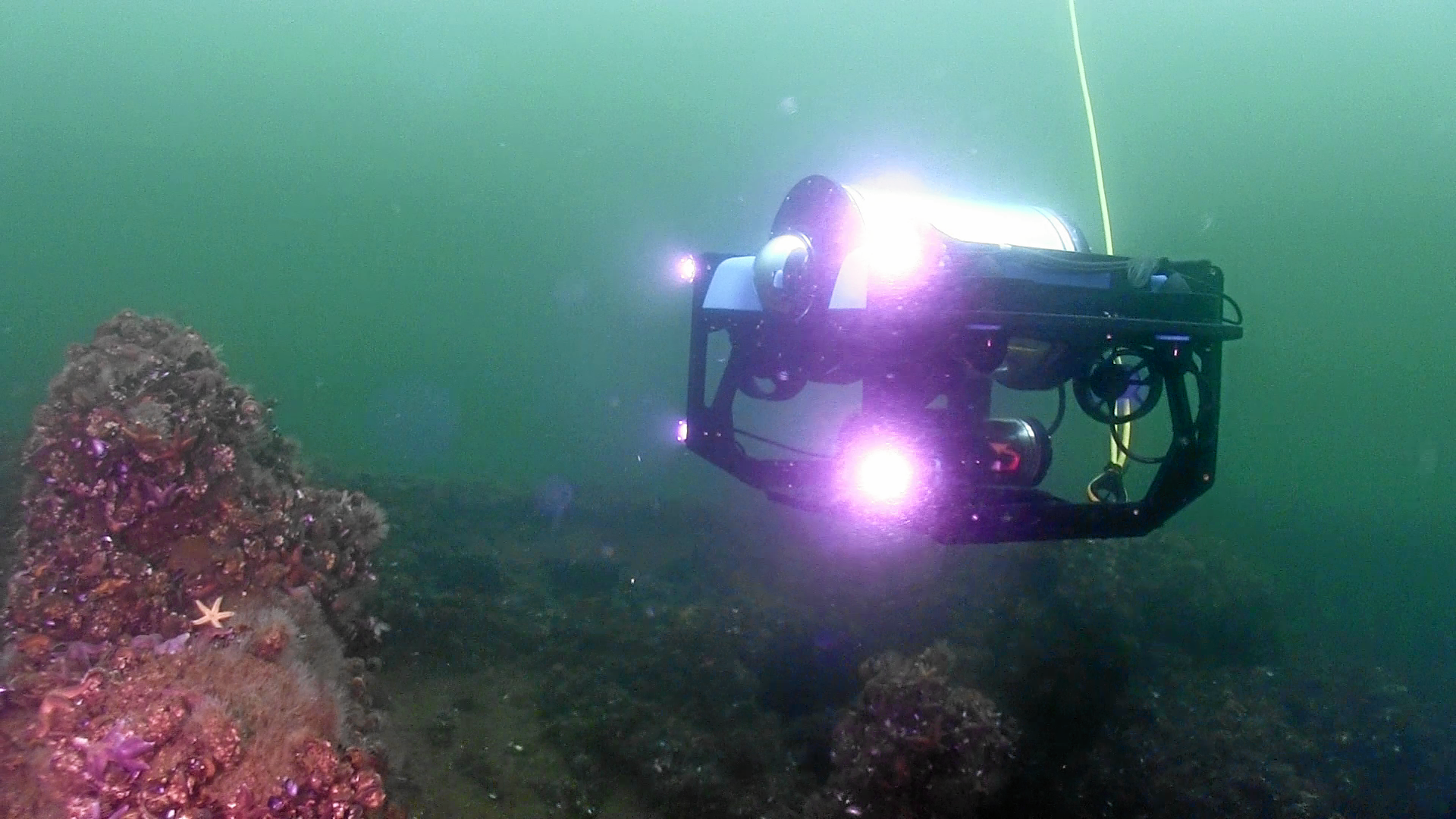
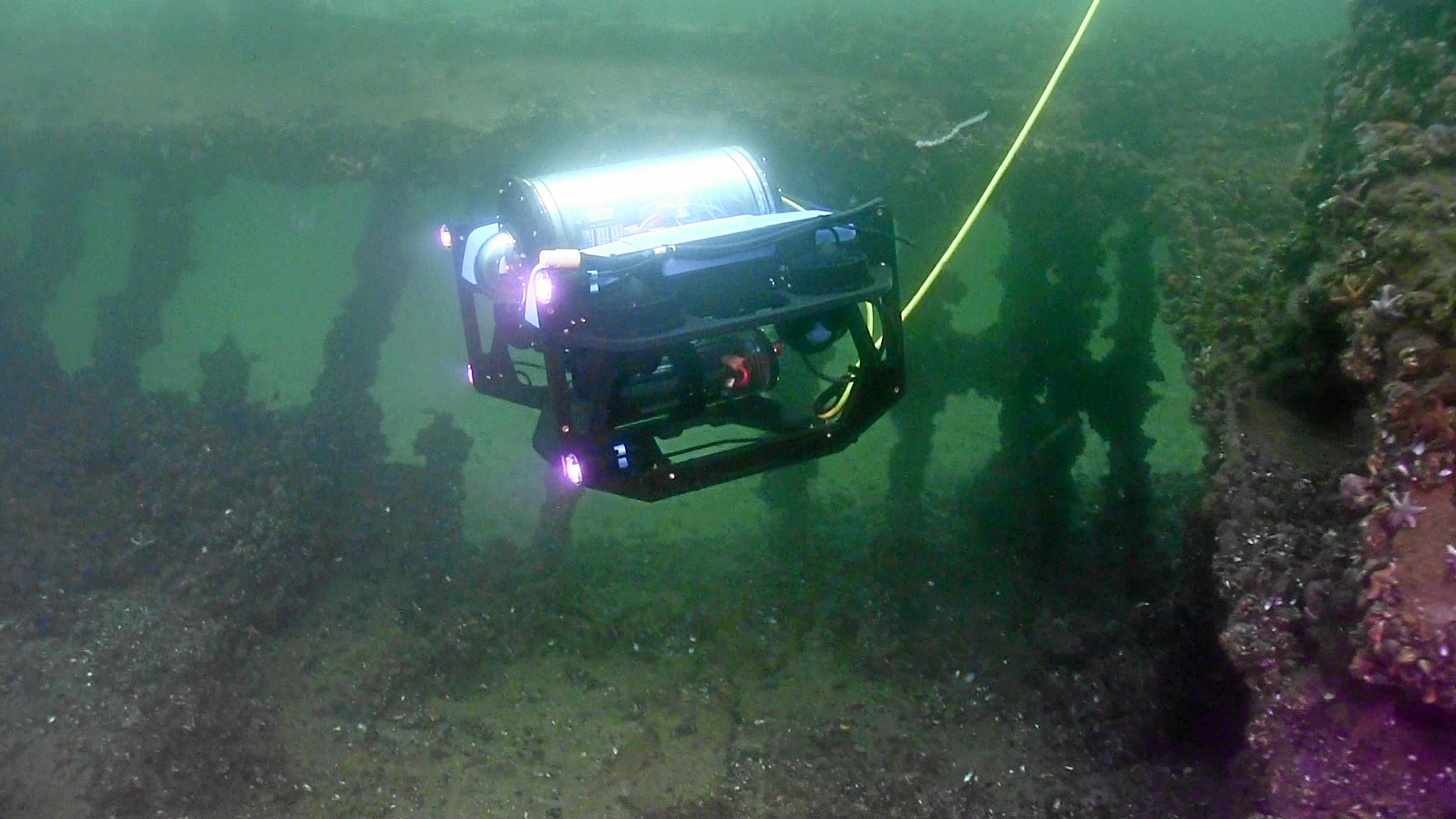
Am 18. November 2020 fand im Rahmen der Abschlusserprobung des MiRo-Base Projekts ein Tauchgang mit dem im Projekt entwickelten ROV (Remotely Operated Vehicle) zu einem Wrack vor Warnemünde statt.
Bei dem Wrack handelt es sich um einen Marineschlepper aus dem zweiten Weltkrieg, welches trotz der vielbefahrenen Lage erst 2009 bei Vermessungsarbeiten gefunden wurde.
Bei dem Tauchgang konnten die Funktionalität der benutzerunterstützenden Regelungsalgorithmen zusammen mit den Arbeiten der Projektpartner erfolgreich belegt werden: Das im Rahmen des Projekts als Testträger entwickelte ROV war gut zur Erkundung des Wracks geeignet und ließ sich dank der aktiven Regelung zuverlässig steuern.
Aufgrund der Corona-Pandemie konnten die Mitarbeiter des Lehrstuhls für Regelungstechnik bei der Erprobung nur von Mitarbeitern des Projektpartners Fraunhofer IGD unterstützt werden. Besonderer Dank gilt an dieser Stelle dem Forschungstaucher-Team um Martin Siegel (www.tauchersiegel.net) sowie Peter Menzel, dem Skipper des Erprobungsbootes, für die gute und entspannte Zusammenarbeit bei der Erprobung.
MiRo-Base – Entwicklung von Methoden zur Modularisierung des Aufbaus ferngesteuerter Unterwasserfahrzeuge
Die expandierende Bewirtschaftung maritimer Gebiete generiert eine wachsende Anzahl an vielfältigen Aufgaben und Problemstellungen im Unterwasserbereich, wie die Wartung von Windenergieanlagen, Pipelines oder anderer unterseeischer Strukturen. Zur Bewältigung dieser Aufgaben werden verstärkt Unterwasserfahrzeuge anstelle von Tauchern eingesetzt, um das Risiko für den Menschen zu minimieren.
Am gebräuchlichsten sind aktuell ferngesteuerte Unterwasserfahrzeuge (ROV – Remotely Operated Vehicle), die im Gegensatz zu komplett autonomen Unterwasserfahrzeugen (AUV – Autonomous Underwater Vehicle) durch menschliche Teleoperation eine höhere Flexibilität in der Aufgabenbewältigung aufweisen. Die neue Klasse der Hybrid-ROV verbindet die Flexibilität von ROV mit den Vorteilen einer vereinfachten Bedienung oder effizienterer Nutzung durch Semi-Automation einzelner Bewegungsmodi. Es haben sich dabei für verschiedene Aufgabenbereiche eigene ROV-Klassen ausgebildet (insbesondere große Working Class ROV für Installationsarbeiten und kleinere Observation Class ROV für Inspektionsarbeiten), wobei die einzelnen Fahrzeuge im Aufbau jedoch wenig Wiederholteile aufweisen und für das von den Herstellern intendierte Anwendungsgebiet quasi maßgeschneidert werden. Dies erschwert Anwendern den Einsatz der ROV in spezifischen, von den Herstellern nicht bedachten Bereichen, wie in Gebieten mit sehr starken Strömungsaufkommen oder bei der Inspektion sehr verschachtelter unterseeischer Strukturen.
Ziel des Vorhabens MiRo-Base ist folgerichtig die Erforschung von Methoden zur Modularisierung des Aufbaus von Hybrid-ROV und Zusammenstellung der so generierten Module in einer Systemplattform. Eine solche Modularisierung erlaubt es Anwendern, ein ROV nach ihren Bedürfnissen zusammenzustellen. Außerdem eröffnet es auch kleineren mittelständischen Unternehmen die Möglichkeit, über die Entwicklung einzelner Module in den Markt der Unterwasserfahrzeuge einzusteigen, was ihnen aufgrund der geschlossenen Systeme der anderen Hersteller ansonsten verwehrt bliebe.
Die Klasse der Hybrid-ROV zeichnet sich von herkömmlichen ROV durch eine erleichterte Bedienbarkeit ab, welche durch die Bereitstellung von teilautomatischen Funktionen erreicht wird. Die Variabilität in der Struktur eines aus Modulen der Systemplattform aufgebauten ROV erzeugt hohe Anforderungen an das Regelungssystem zur autonomen Steuerung eines solchen Fahrzeugs. Das Ziel des Teilvorhabens ist deshalb die Erforschung von Methoden zur Generierung eines intelligenten Regelungssystems für modulare Unterwasserfahrzeuge. Das intelligente Regelungssystem hat nicht nur die Erleichterung der Bedienung durch teilautomatische Steuerung des Fahrzeugs zur Aufgabe, sondern ermöglicht durch aktive Stabilisierung auch den Einsatz in ausgewählten Bewegungsachsen willentlich instabil aufgebauter Fahrzeuge, die durch diesen Aufbau eine große Manövrierfähigkeit aufweisen. Zur Erhöhung der Einsatzsicherheit der modularen Systemplattform werden notwendige Methoden zur Diagnose auftretender Fehler und Systemeinschränkungen sowie zur fehlertoleranten Regelung erarbeitet.

Prof. Dr.-Ing. Torsten Jeinsch
Lehrstuhl Regelungstechnik | Leiter Anwendungszentrum Regelungstechnik (AZR)
➜ Short Card | ➜ Science Stories | ➜ Homepage | ➜ AZR