Science-Story ➜ Autonome elektrische Schifffahrt in Metropolregionen

A-SWARM – Autonome elektrische Schifffahrt auf Wasserstraßen in Metropolregionen
Das Projekt A-SWARM – Autonome elektrische Schifffahrt auf Wasserstraßen in Metropolregionen soll einen Beitrag zur modernen Stadtlogistik leisten. Dazu können autonome Wasserfahrzeuge eingesetzt werden, die zu einem großen Schiff zusammengekoppelt werden können.
Der Schwerpunkt des Projektes liegt auf der Entwicklung autonom arbeitender, koppelbarer und elektrisch betriebener Oberflächenfahrzeuge. Autonom bedeutet, dass die Fahrzeuge bis auf GPS ohne wesentliche landseitige Unterstützung operieren. Die Demonstratoren sollen einzeln oder miteinander verbunden betrieben werden. Die Machbarkeit eines derartigen Systems soll durch einen Demonstratorbetrieb in einem Reallabor nachgewiesen werden.
Projektpartner sind BEHALA, EBMS TU Berlin, infineon, SVA Potsdam, Lehrstuhl Regelungstechnik von Prof. Torsten Jeinsch an der Universität Rostock, Veinland.
Das Projekt wird vom Bundesministerium für Wirtschaft und Energie (BMWi) finanziert.

Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.
Video: Musik von Robert Damerius
Ersterprobung im Verbundprojekt A-SWARM
Vom 22. bis zum 26. März 2021 fand die erste Erprobung der Versuchswasserfahrzeuge in Potsdam statt.
Einer dieser Versuchsträger stand in der Schlepprinne beim Projektkoordinator SVA – Schiffbau-Versuchsanstalt Potsdam GmbH zur Verfügung. Ein Demonstrator ist mit zwei um 360 Grad drehbaren 5 kW Inline-Triebwerken (RIM-Antrieben) ausgestattet.
Die Positionsmessung erfolgte im Innenbereich mit einem am Messwagen installierten, optischen Trackingsystem (Qualisys Motion Capture System). Die Tests dienten zur Identifikation des Bewegungsmodells des Fahrzeuges und zur Parametrierung des Regelsystems, das eine flexible und präzise Geschwindigkeits- und Positionsregelung ermöglicht. Das Bewegungsmodell dient zudem als Grundlage für das nichtlineare Kalman-Filter, das neben der modellbasierten Geschwindigkeitsberechnung auch eine Schätzung der Strömungs- und Windkräfte vornimmt. Weiterhin wurden die Effizienz und Performance verschiedener Betriebsmodi für Allokation (Zuordnung), Filter- und Reglerstruktur untersucht.
Ziele dieser Testwoche waren das präzise Manövrieren des Fahrzeuges in beengten Umgebungen sowie das schnelle Kompensieren von Störungen wie Strömung und Wind. Diese Ziele konnten erfolgreich umgesetzt werden. Das hier getestete Regelsystem bildet die Grundlage für das im Projekt zu entwickelnde Guidance-Navigation-Control System (GNC), das wiederum die Basis für einen zukünftigen autonomen Betrieb von Binnenschiffen ist.
Im nächsten Schritt erfolgt die Integration der geplanten Fernfeld- und Bewegungssensorik für den Test des Fahrzeuges im Freifeld.
Landgestützte Versuchsträger als Simulatoren für A-SWARM
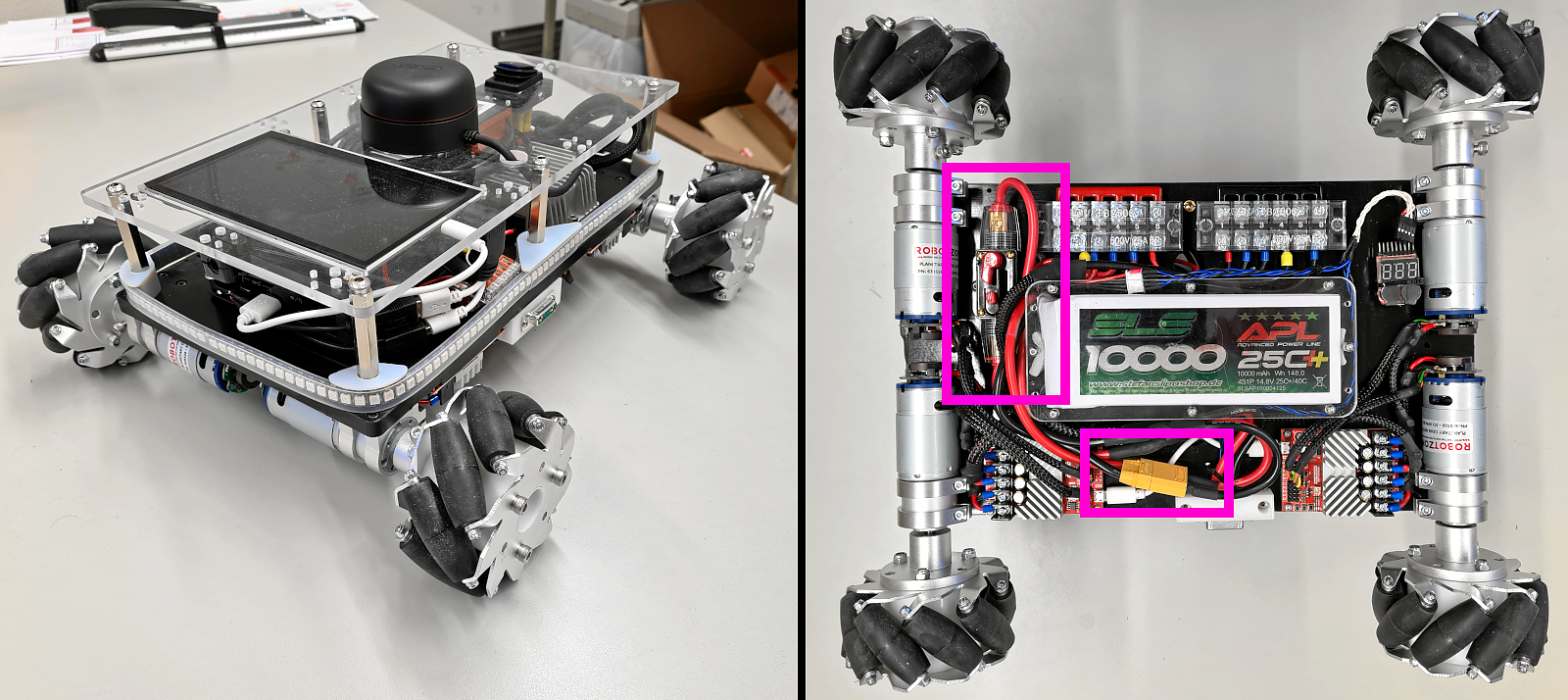
Das Bild und die beiden Videos zeigen (Land-)Modelle, die als Real-Simulatoren für die Bewegung der Schiffe verwendet werden.
Der ursprüngliche Gedanke war, diese Systeme zur Plausibilitätsprüfung der Allokation einzusetzen. Aktuell werden sie zum Testen der LIDAR- und Radar-Sensoren im Zusammenhang mit SLAM Algorithmen genutzt.
Zukünftig werden diese Modelle in die Lehre übernommen und als Praktikumsversuche im Master eingesetzt werden.

Prof. Dr.-Ing. Torsten Jeinsch
Lehrstuhl Regelungstechnik | Leiter Anwendungszentrum Regelungstechnik (AZR)
➜ Short Card | ➜ Science Stories | ➜ Homepage | ➜ AZR